Research
🌟 What I Do
I aim to build intelligent navigation systems that enable robots to operate autonomously in complex, unstructured environments.
🔬 Research Themes
Foundation Models for Intelligent Decision-Making
Developing LLM and VLM-based systems for adaptive reasoning and planning. Focusing on prompt engineering, fine-tuning with domain-specific data, and real-time inference optimization for sequential decision-making tasks.Deep Reinforcement Learning for Adaptive Control
Designing model-free and hierarchical RL algorithms for continuous control problems. Investigating policy learning, reward shaping, and sim-to-real transfer methods for deployment in complex, dynamic environments.Learning-based Motion Planning
Creating neural planning methods that leverage learned representations for efficient path generation. Developing learned heuristics, memory-augmented frameworks, and hybrid approaches combining classical and learning-based techniques.
🚀 Future Directions
My future research aims to advance foundation models and reinforcement learning for more complex decision-making scenarios.
Key directions:
- Scaling LLM/VLM reasoning to longer horizons and multi-agent systems
- Sample-efficient RL for high-dimensional continuous control tasks
- Bridging the gap between learned policies and real-world deployment
🤖 Hardware Platforms
I work with diverse robot platforms to validate algorithms in both simulation and real-world environments.
| Robot | Image | Type | Use Case |
|---|---|---|---|
| Unitree Go1 |  | Quadruped | Visual–LiDAR fusion, RL locomotion |
| Unitree Go2 |  | Quadruped | VLM navigation, cross-modal perception |
| Unitree G1 |  | Humanoid | LLM-guided policy learning |
| Clearpath Jackal |  | Wheeled UGV | Real-world navigation testing |
| Clearpath Husky |  | Wheeled UGV | Outdoor mapping, multi-sensor fusion |
🛠️ Simulation Environments
I design and use multiple simulation platforms for both classical planning and learning-based navigation.
| Environment | Image | Description |
|---|---|---|
| Gazebo |  | Classic ROS-based simulator for wheeled robots, supporting costmaps, sensor fusion, and realistic physics. |
| Isaac Gym |  | GPU-accelerated simulation for large-scale reinforcement learning and policy optimization. |
| Isaac Sim | 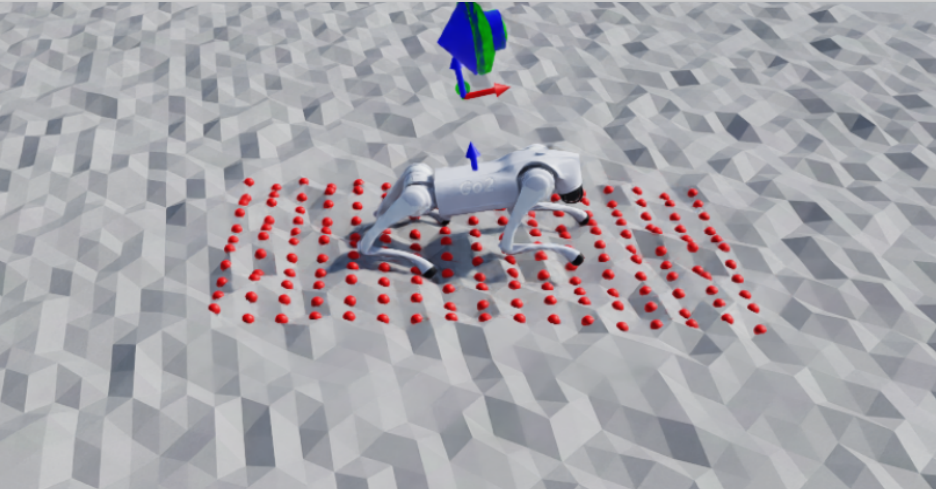 | High-fidelity NVIDIA Omniverse simulator for perception, dynamics, and multi-robot coordination. |
| Custom Terrains | 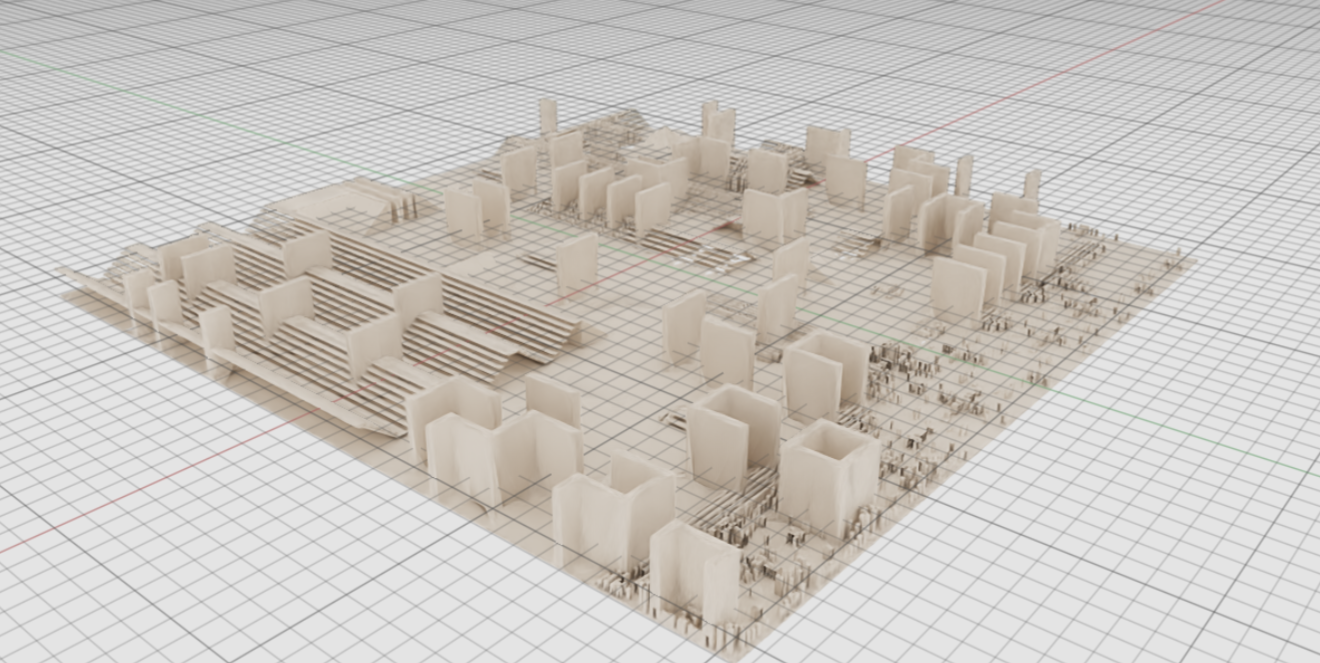 | Procedurally generated terrains for testing locomotion, stability, and adaptive control. |
| Self-design Simulation | 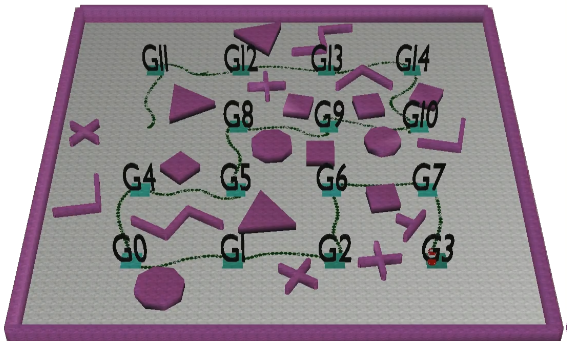 | self-design simulation using C++ for motion planning or multi-goal motion planning. |