Publications
ICRA 2026
Adaptive Dynamics Planning for Robot Navigation
Y. Lu, M. Mao, T. Xu, L. Wang, X. Lin, X. Xiao — under review at IEEE International Conference on Robotics and Automation (ICRA), 2026 Integrates adaptive dynamics modeling with learning-based local planners for efficient navigation in constrained environments. | paper
Y. Lu, M. Mao, T. Xu, L. Wang, X. Lin, X. Xiao — under review at IEEE International Conference on Robotics and Automation (ICRA), 2026 Integrates adaptive dynamics modeling with learning-based local planners for efficient navigation in constrained environments. | paper
IROS 2025

IROS 2025

RA-L 2025
Verti-Bench: A General and Scalable Off-Road Mobility Benchmark for Vertically Challenging Terrain
T. Xu, C. Pan, M. B. Rao, A. Datar, A. Pokhrel, Y. Lu, X. Xiao — IEEE Robotics and Automation Letters (RA-L), 2025 Benchmark for vertical mobility across heterogeneous terrain profiles. | paper | video
T. Xu, C. Pan, M. B. Rao, A. Datar, A. Pokhrel, Y. Lu, X. Xiao — IEEE Robotics and Automation Letters (RA-L), 2025 Benchmark for vertical mobility across heterogeneous terrain profiles. | paper | video
ICRA 2025

Autonomous Ground Navigation in Highly Constrained Spaces: Lessons Learned from the Fourth BARN Challenge at ICRA 2025
X. Xiao, Z. Xu, S. A. Ghani, A. Datar, D. Song, P. Stone, K. Yazdipaz, Y. Lu, … — IEEE International Conference on Robotics and Automation (ICRA), 2025 (Competition Track) Report and analysis from large-scale constrained-space navigation benchmarking. | paper | website
X. Xiao, Z. Xu, S. A. Ghani, A. Datar, D. Song, P. Stone, K. Yazdipaz, Y. Lu, … — IEEE International Conference on Robotics and Automation (ICRA), 2025 (Competition Track) Report and analysis from large-scale constrained-space navigation benchmarking. | paper | website
ICRA 2025
ICRA 2024
IROS 2023
Leveraging Single-goal Predictions to Improve the Efficiency of Multi-goal Motion Planning with Dynamics
Y. Lu, E. Plaku — IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 Single-goal predictors as priors to accelerate multi-goal planning with dynamics. | paper | video
Y. Lu, E. Plaku — IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 Single-goal predictors as priors to accelerate multi-goal planning with dynamics. | paper | video
IROS 2022
Improving the Efficiency of Sampling-based Motion Planners via Runtime Predictions for Motion-planning Problems with Dynamics
H. D. Bui, Y. Lu, E. Plaku — IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 Runtime predictions informing sampling-based planning under dynamics. | paper | video
H. D. Bui, Y. Lu, E. Plaku — IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 Runtime predictions informing sampling-based planning under dynamics. | paper | video
BIBM 2021
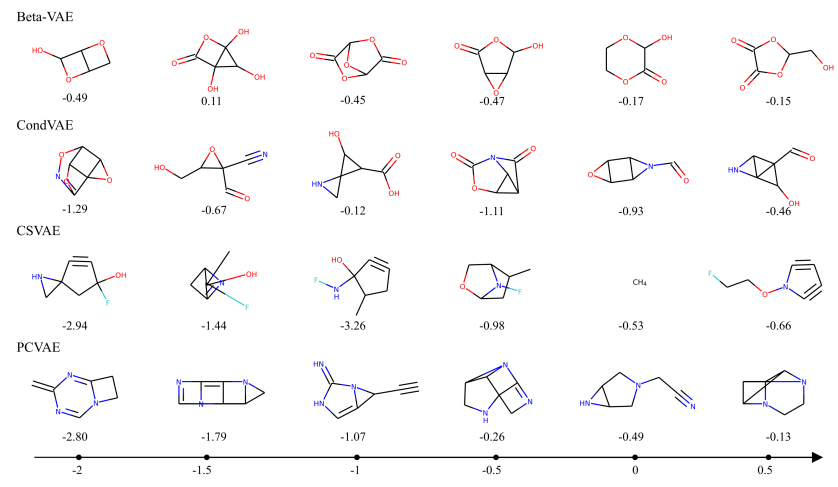
Deep Latent-variable Models for Controllable Molecule Generation
Y. Du, Y. Wang, F. Alam, Y. Lu, X. Guo, L. Zhao, A. Shehu — IEEE International Conference on Bioinformatics and Biomedicine (BIBM), 2021 Controllable molecule generation via latent-variable models. | paper
Y. Du, Y. Wang, F. Alam, Y. Lu, X. Guo, L. Zhao, A. Shehu — IEEE International Conference on Bioinformatics and Biomedicine (BIBM), 2021 Controllable molecule generation via latent-variable models. | paper